Основные принципы определения координат
В основе определения координат GPS-приемника лежит вычисление расстояния от него до нескольких спутников, расположение которых считается известным (эти данные находятся в принятом с GPS-спутника «альманахе»). В геодезии метод вычисления положения объекта по измерению его удаленности от точек с заданными координатами называется «трилатерацией» (рис. 1)
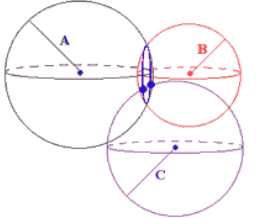 |
| рис.1 Определение координат в СРНС |
Если известно расстояние А до одного спутника, то координаты приемника определить нельзя (он может находиться в любой точке сферы радиусом А, описанной вокруг спутника). Пусть известна удаленность В приемника от второго спутника. В этом случае определение координат также не представляется возможным — объект находится на окружности, которая является пересечением двух сфер. Расстояние С до третьего спутника сокращает неопределенность в координатах до двух точек (обозначены двумя жирными точками на рис. 1). Этого уже достаточно для однозначного определения координат — дело в том, что из двух возможных точек расположения приемника лишь одна находится на поверхности Земли (или в непосредственной близости от нее), а вторая, ложная, оказывается либо глубоко внутри Земли, либо очень высоко над ее поверхностью. Таким образом, для трехмерной навигации теоретически достаточно знать расстояния от приемника до 3 спутников.
Однако все не так просто. Приведенные выше рассуждения рассматривались для случая, когда расстояния от точки наблюдения до спутников были известны с абсолютной точностью. Разумеется, на практике всегда есть некоторая погрешность измерений («невязка») — например, из-за неточной синхронизации часов приемника и спутника, зависимости скорости света от состояния атмосферы и др. Поэтому для определения трехмерных координат GPS-приемника используются не 3, а, как минимум, 4 спутника. Получив сигнал от 4 (или более) спутников, GPS-приемник ищет точку пересечения соответствующих сфер. Если такой точки нет, процессор GPS-приемника начинает методом последовательных приближений корректировать свои часы до тех пор, пока не добьется пересечения всех сфер в одной точке. Координаты подвижного абонента определяются с помощью стандартного навигационного GPS-приемника, встроенного в терминал пользователя. Навигационный приемник сигналов для системы GPS состоит из приемного модуля и малогабаритной антенны с малошумным усилителем. Приемный модуль выпускается как в виде автономного устройства со встроенными источниками питания, так и в виде отдельной платы, встраиваемой в абонентский терминал. Устройство, как правило, использует собственную миниатюрную антенну и автономно вычисляет географические координаты и всемирное время (UTC) по навигационным сигналам. GPS-приемники чаще всего применяются, если необходимо получить высокую точность координат (погрешность — не более 100 м). Захватив сигнал, навигационный приемник автоматически вычисляет координаты объекта, скорость сигнала и всемирное время, и формирует отчет. Сведения о местонахождении объекта передаются по спутниковым каналам связи в
диспетчерский пункт. Навигационные устройства могут различаться по количеству каналов приема, скорости обновления данных, времени вычислений, точности и надежности определения координат.
Современные GPS-устройства обычно оснащены 6-8 приемниками, что позволяет отслеживать, практически, все навигационные спутники, находящиеся в зоне радиовидимости объекта. Если каналов меньше, чем «наблюдаемых» спутников, автоматически выбирается наиболее оптимальное сочетание спутников. Скорость обновления навигационных данных — 1 с. Время обнаружения зависит от числа одновременно наблюдаемых спутников и режима определения местоположения. Определение навигационных параметров может производиться в двух режимах — 2D (двумерном) и 3D (пространственном). В режиме 2D устанавливаются широта и долгота (высота считается известной). При этом достаточно присутствия в зоне радиовидимости 3 спутников. Время
определения координат в режиме 2D обычно не превышает 2 мин. Для определения пространственных координат абонента (режим 3D) требуется, чтобы в соответствующей зоне находились не менее 4 спутников. Гарантируются время обнаружения не более 3-4 мин и погрешность вычисления координат — не более 100 м. В околоземном пространстве развернута сеть искусственных спутников Земли (ИСЗ), равномерно “покрывающих” всю земную поверхность. (Рис.2) Орбиты ИСЗ вычисляются с очень высокой точностью, поэтому в любой момент времени известны координаты каждого спутника. Радиопередатчики спутников непрерывно излучают сигналы в направлении Земли. Эти сигналы принимаются GPS-приемником, находящемся в некоторой точке земной поверхности, координаты которой нужно определить.
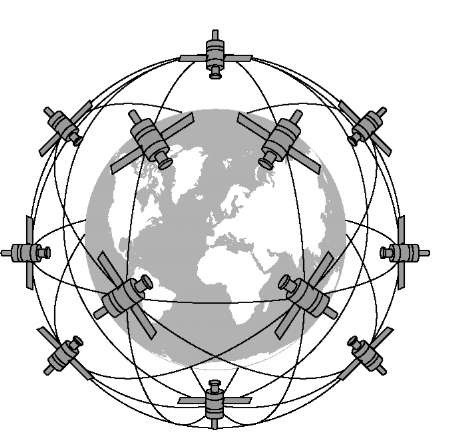 |
| рис.2 Орбиты спутников |
В приемнике измеряется время распространения сигнала от ИСЗ и вычисляется дальность “спутник-приемник” (радиосигнал, как известно, распространяется со скоростью света). Поскольку для определения местоположения точки нужно знать три координаты (плоские координаты X, Y и высоту H), то в приемнике должны быть измерены расстояния до трех различных ИСЗ. Очевидно, при таком методе радионавигации (он называется беззапросным) точное определение времени распространения сигнала возможно лишь при наличии синхронизации временных шкал спутника и приемника. Поэтому в состав аппаратуры ИСЗ и приемника входят эталонные часы (стандарты частоты), причем точность спутникового эталона времени исключительно высока (долговременная относительная стабильность частоты обеспечивается на уровне 10-13 - 10-15 за сутки). Бортовые часы всех ИСЗ синхронизированы и привязаны к так называемому “системному времени”. Эталон времени GPS- приемника менее точен, чтобы чрезмерно не повышать его стоимость. Этот эталон должен обеспечивать только кратковременную стабильность частоты - в течение процедуры измерений.